Die Versuche lassen erkennen, dass proportionale und
differenzielle Systemanteile am übertragungsverhalten der glatten
corpus cavernosum-Muskulatur beteiligt sind, und diese Elemente
mindestens linear sind — wenn nicht sogar nichtlinear. Es wird
sich zeigen, ob die hier eingeschlagene lineare Annahme
gerechtfertigt ist.
Für lineare Systeme lässt sich das Ausgangssignal eines
Systems mit Hilfe des Faltungsintegrals
(5)
darstellen [11]. Dabei ist das Eingangssignal
und die Gewichtsfunktion oder Impulsantwort des Systems
im Zeitbereich. Die übertragungsfunktion ist die
Gewichtsfunktion im Frequenzbereich. und bezeichnen die Eingangs- bzw. Ausgangssignale im
Frequenzbereich (siehe Abbildung 36). Der zu
Gleichung 5 analoge Zusammenhang im Frequenzbereich
lautet [11]:
(6)
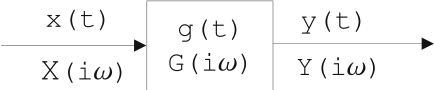
Abbildung 36:
Blockschaltbild eines linearen Prozesses und
Charakterisierung des dynamischen Verhaltens durch
Gewichtsfunktion und übertragungsfunktion .
Hier wird nun gemäß Gleichung 6 die
übertragungsfunktion aus den Fouriertransformierten Eingangs- und
Ausgangssignalen bestimmt. Durch Rücktransformation der
übertragungsfunktion in den Zeitbereich gewinnt man dann die
Impulsantwort.
8.2.1 Messdaten
Abbildung 37:
Die gemessenen Eingangs- und Ausgangssignale (Probe 6-C)
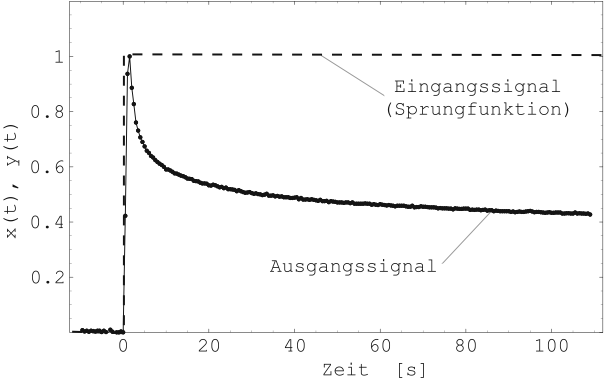
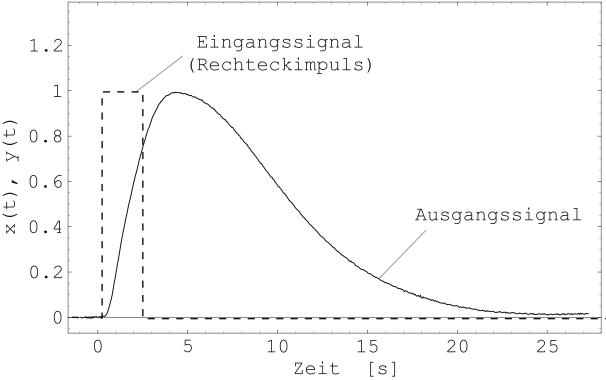
Abbildung 37 zeigt die gemessenen, normierten
Eingangssignale (gestrichelte Linie) und Ausgangssignale
(durchgezogene Linie) für Probe 6-C. Die Normierung wurde
für beide Signale so gewählt, dass der größte gemessene Wert
mit eins zusammenfällt. Da die zeitkontinuierlichen Messgrößen
mit einer Frequenz von 20 Hz diskret abgetastet werden, schreiben
wir die gemessenen Daten folgendermaßen:
(7)
Dabei ist hier .
8.2.2 Bestimmung der übertragungsfunktion
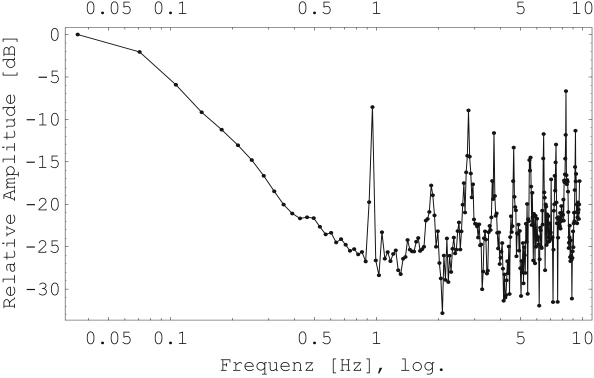
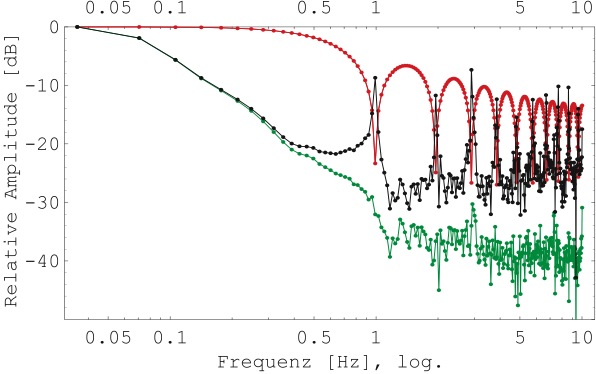
Abbildung 38:
Spektren des Eingangssignals (rot) und
Ausgangssignals (grün), sowie die
übertragungsfunktion (schwarz)
Für die übertragungsfunktion eines linearen Prozesses gilt nach
Gleichung 6:
(8)
Für die Spektren der Eingangs- und Ausgangssignale gilt (z.B.
[17], [11]):
(9)
(10)
Nun liegen die Signale aber nicht in kontinuierlicher sondern in
diskreter Form vor (siehe Gleichung 7). An die Stelle
der Fouriertransformation in den Gleichungen 9 und
10 tritt deshalb die diskrete Fouriertransformation (z. B. [17], [11]):
(11)
(12)
Hierbei ist insbesondere zu beachten, daß die gemessenen
Signale nicht nur diskret sondern auch nur im endlichen Umfang von
N Messwerten vorliegen. Dies kann bei der Rücktransformation an
den Signalrändern zu Verzerrungen führen. Dieser Effekt wird
''Leck-Effekt'' genannt (engl. leakage) [11].
Das kontinuierliche Spektrum eines diskreten
Signals ist periodisch. Die endlichen und diskreten
Spektren und aus Gleichungen 11 und
12 stellen nun genau eine Periode des periodischen
Spektrums dar. Die Zusammenhänge lauten [11]:
(13)
Da die Signale und reell sind, sind die
diskreten Fouriertransformierten symmetrisch. Für birgt
das diskrete Spektrum bzw. keine neuen
Informationen. Nach dem Shannon'schen Abtasttheorem sind Spektren
sowieso nur bis zur halben Abtastfrequenz sinnvoll [11].
In Abbildung 38 sind die Spektren des diskreten
Eingangssignals (rot), des diskreten Ausgangssignals (grün) und die mit Gleichung 7 berechnete
übertragungsfunktion (schwarz) dargestellt. Auf der Abszisse ist
der 10er Logarithmus der Frequenz aufgetragen; auf der Ordinate
sind die Beträge der komplexen Fouriertransformierten als
logarithmierte Verhältnisse zum Maximalbetrag in Dezibel
aufgetragen. Um die Grafen übersichtlich zu halten, wurden die
Spektren geglättet. Die Berechnungen wurden mit dem Programm
Mathematica 3.0 durchgeführt.
Die Rücktransformation der übertragungsfunktion in
den Zeitbereich liefert die Impulsantwort oder Gewichtsfunktion
des Systems. Dieses erledigt die diskrete inverse
Fouriertransformation, die folgendermaßen lautet (z.B.
[17], [11]):
(14)
Dabei sind die die Werte der in Abbildung
38 dargestellten geglätteten übertragungsfunktion.
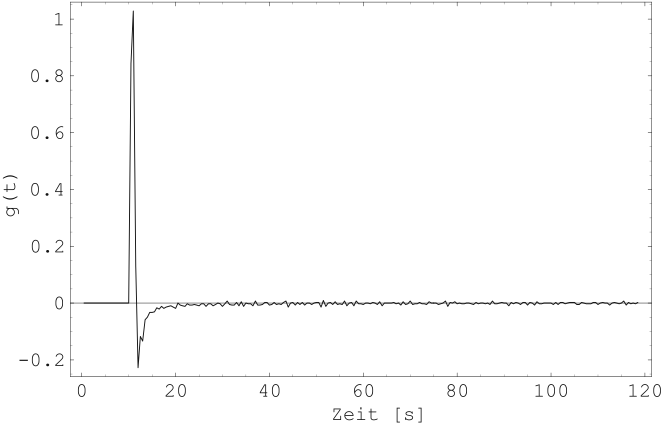
In Abbildung 39 ist die nochmals geglättete
Impulsantwort dargestellt. Da gerade Symmetrie
besitzt, wird rein reell bei der Rücktransformation
[11].
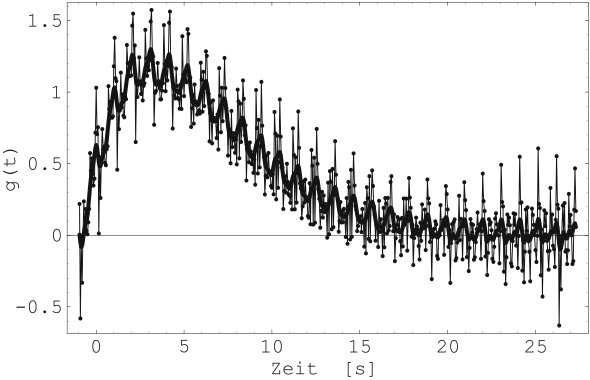
Abbildung 39:
Die Impulsantwort berechnet durch Fouriertransformation
8.3 Bestimmung im aktiven Fall durch das Faltungsintegral
Hier wird die Impulsantwort des aktiven Verhaltens direkt aus der
Faltungssumme (Gleichung 5) berechnet.
Es werden die gleichen Daten wie im vorherigen Abschnitt verwendet
(siehe Abbildung 37 und Text Abschnitt
8.2.1) .
8.3.2 Berechnung der Impulsantwort
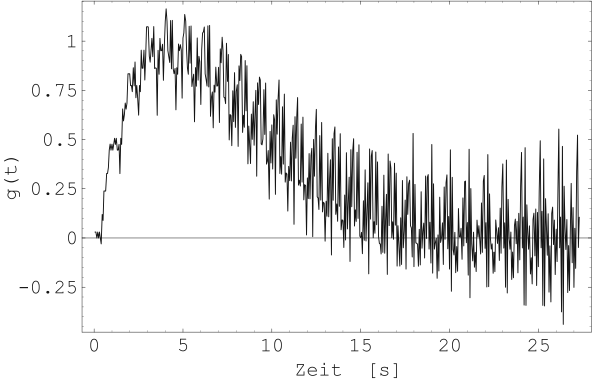
Abbildung 40:
Die Impulsantwort berechnet durch die Faltungssumme
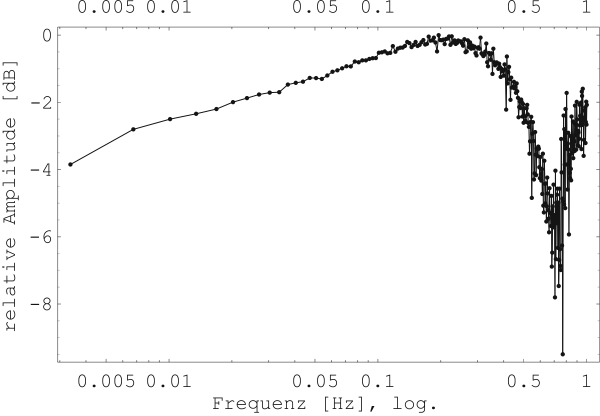
Abbildung 41:
Das Spektrum der Impulsantwort
Da die Eingangs- und Ausgangssignale auch hier gemäß Gleichung
7 diskret abgetastet wurden, geht das Faltungsintegral
(Gleichung 5) in die Faltungssumme
(15)
über [11]. Dabei ist die Zeit zwischen zwei
Abtastungen. Wenn Werte aufgezeichnet wurden, können wir
Gleichung 15 in folgende Matrixform bringen:
(16)
Dabei sind
,
und
Damit lässt sich die gesuchte Impulsantwort angeben:
In Abbildung
40 ist die so bestimmte Impulsantwort dargestellt.
Abbildung 41 zeigt das zugehörige Spektrum. Die
Berechnungen wurden mit dem Programm Mathematica 3.0 durchgeführt.
8.4 Bestimmung im passiven Fall durch das Faltungsintegral
Hier wird die Impulsantwort des passiven Verhaltens direkt aus der
Faltungssumme (Gleichung 5) berechnet.
Abbildung 42 zeigt die gemessenen, normierten
Eingangssignale (gestrichelte Linie) und Ausgangssignale
(durchgezogene Linie) für Probe 7-C. Die Normierung wurde
für beide Signale so gewählt, dass der größte gemessene Wert
mit eins zusammenfällt. Das Eingangssignal ist in diesem Fall eine
sprunghafte Längung der Probe um . Da die
zeitkontinuierlichen Messgrößen mit einer Frequenz von 2 Hz
diskret abgetastet werden, schreiben wir die gemessenen Daten
als:
Die Impulsantwort wird nun genau wie in Abschnitt 8.3.2
berechnet. In Abbildung 43 ist die so bestimmte
Impulsantwort dargestellt. Abbildung 44 zeigt das
zugehörige Spektrum.
Abbildung 42:
Die gemessenen Eingangs- und Ausgangssignale. Das
Eingangssignal ist eine sprunghafte Längung der Probe um
.
Abbildung 43:
Die Impulsantwort berechnet durch die Faltngssumme
![\begin{displaymath}M(N)=\left[\begin{array}{ccccc}x(1) & 0 & 0 &\dots
&0\cr
x(2...
...x(N-1) & x(N-2) & \dots & x(1) \cr \end{array} \right] \quad . \end{displaymath}](img261.png)