In diesem Abschnitt wird sowohl das aktive und das passive
Verhalten anhand der in Abschnitt 8 ermittelten
Impulsantworten mit möglichst einfachen linearen Systemen
identifiziert. Das aktive Verhalten wird im Folgenden durch ein
-System beschrieben, das passive Verhalten mittels eines
-Systems.
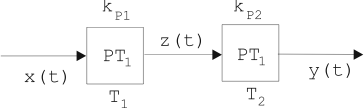
Ein -System entsteht durch Reihenschaltung von zwei
-Systemen (siehe Abbildung 45). Für ein
-System gilt [11]:
(18)
Dabei bezeichnet das Eingangssignal und das
Ausgangssignal. sind die Zeitkonstante der Verzögerung und
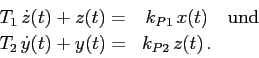
die Verstärkungskonstante. Für das in Abbildung
45 dargestellte -System gilt also:
(19)
Die Elimination von führt auf:
(20)
Das Produkt der beiden Verstärkungskonstanten
wird im folgenden zum Parameter . Damit schreibt sich
Gleichung 20 als:
(21)
Abbildung 45:
Ein -System als Reihenschaltung zweier
-Systeme
Für bestimmte Eingangssignale ist die Lösung der
Differentialgleichung 21 analytisch darstellbar.
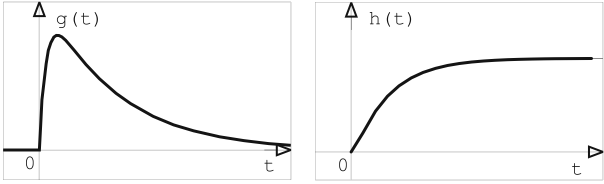
Die Impulsantwort (siehe Abbildung
46) und die Sprungantwort (siehe Abbildung
46) dieses Systems lauten [11]:
(22)
(23)
Dabei ist die Sprungfunktion, für die gilt
, sonst . Die Reaktion dieses Systems auf einen
Rechteckimpuls ist durch Kombination zweier Sprungantworten in
Abbildung 47 dargestellt.
Die Impulsantwort des aktiven Verhaltens wurde zum einen in
Abschnitt 8.2.2 mit Hilfe der Fouriertransformation
bestimmt und zum anderen in Abschnitt 8.3 über die
Faltungssumme berechnet. Ein Vergleich der so bestimmten
Impulsantworten in den Abbildungen 39 und
40 mit der Impulsantwort eines -Systems in
Abbildung 46 zeigt, dass ähnliches Systemverhalten
vorliegt. Dies äußert sich auch im zeitlichen Verlauf der
Reaktion auf einen Rechteckimpuls des Muskels (Abbildung
37) und eines -Systems (Abbildung
47). Im folgenden wollen wir das aktive Verhalten
mit einem -System beschreiben.
Abbildung 46:
Impulsantwort und Sprungantwort eines
-Systems
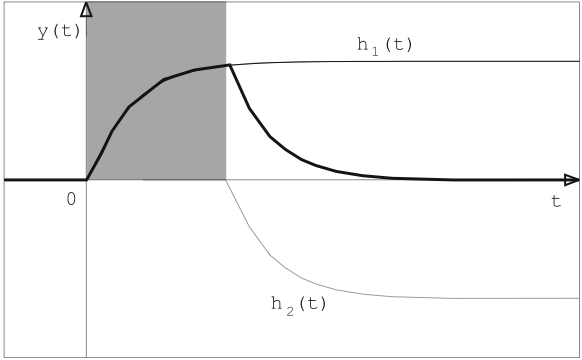
Abbildung 47:
Systemantwort eines -Systems auf einen
Rechteckimpuls (graues Rechteck), zusammengesetzt aus zwei
Sprungantworten und .
Ein -System entsteht durch Zusammenschalten eines
-Systems, eines -Systems und eines -Systems (siehe
Abbildung 48). Für ein -System gilt
[11]:
(24)
Hierbei ist die Differenziationsverstärkung. Für ein
-System gilt [11]:
(25)
Dabei ist die Verstärkungskonstante. Hier setzen wir
. Ein System wurde schon in Abschnitt 9.1.1
vorgestellt. Eine Zusammenschaltung nach Abbildung
48 ergibt dabei folgende Differenzialgleichung:
(26)
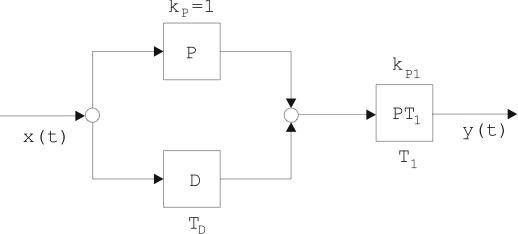
Abbildung 48:
Das -System als Reihenschaltung eines
-systems und einer Parallelschaltung eines - und eines
-Systems
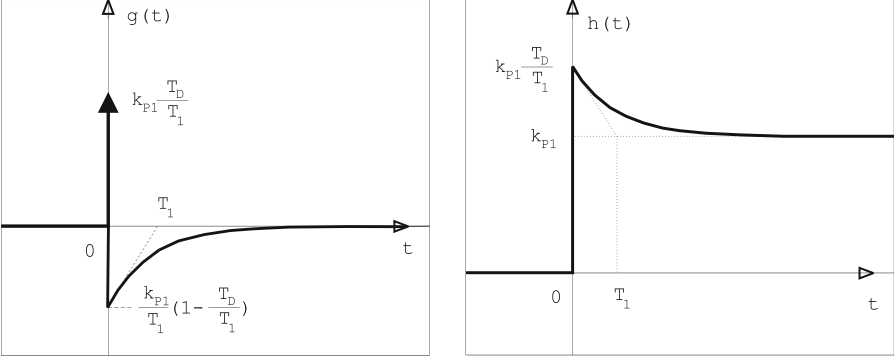
Die Impulsantwort und die Sprungantwort (siehe
Abbildung 49) dieses Systems lauten [11]:
(27)
(28)
Dabei sind die Sprungfunktion, für die gilt
, sonst , und der Dirac-Impuls.
Abbildung 49:
Impulsantwort und Sprungantwort eines
-Systems
Die Impulsantwort des passiven Verhaltens wurde in Abschnitt
8.4 über die Faltungssumme berechnet. Ein Vergleich
der so bestimmten Impulsantwort in Abbildung 43 mit
der Impulsantwort eines -Systems in Abbildung
49 zeigt, dass ähnliches Systemverhalten vorliegt.
Dies äußert sich auch im zeitlichen Verlauf der Reaktion auf eine
Sprungantwort des Muskels (Abbildung 42) und eines
-Systems (Abbildung 49). Im folgenden
wollen wir das passive Verhalten mit einem -System
beschreiben.
Nächste Seite:10 Parameteridentifikation Aufwärts:3 Theoretischer Teil Vorherige Seite:8 Bestimmung der ImpulsantwortenInhalt
Thorsten Foerstemann (thorsten@foerstemann.name)