Es wird zunächst ein allgemeines Verfahren vorgestellt, mit dem
sich die Parameter des -Systems (, , ),
sowie des -Systems (, , ) bestimmen
lassen. Danach werden die Ergebnisse der Parameteridentifikation
vorgestellt.
Zur Bestimmung der Systemparameter werden zunächst aus den
Messdaten der Proben 6-C, 7-C und 9-F das normierte
Eingangssignal und das Ausgangssignal aus den
Messwerten gebildet. Die Normierung wurde für das Eingangssignal
so gewählt, dass der größte gemessene Wert mit eins
zusammenfällt. Die Normierung des Ausgangssignals wurde mit den
Normierungskonstanten aus Tabelle 2
durchgeführt. Da die zeitkontinuierlichen Messgrößen diskret
abgetastet werden, liegen Messpunkte jeweils des Ein- und
Ausgangssignals in der Form vor:
(32)
10.2.2 Modellansatz
Um das aktive Verhalten zu modellieren, wählen wir einen Ansatz
gemäß Gleichung 21 mit den Parametern ,
und . Da die noch zu ermittelnden
Parameterschätzwerte für das aktive Verhalten mit denen für das
passive Verhalten im späteren Verlauf verglichen werden sollen,
ist es sinnvoll, neue Bezeichner einzuführen, um Verwechslungen zu
vermeiden. Um deutlich herauszustellen, dass es sich bei
bestimmten Größen um Parameterschätzwerte handelt, werden
diese zusätzlich mit einem Dach gekennzeichnet. Für die
Parameterschätzwerte des aktiven Verhaltens werden wir im
folgenden schreiben:
,
und
. Analog zu Gleichung 30 schreiben wir
hier:
Um zu bestimmen, wird die inhomogene
Differenzialgleichung 34 numerisch mit Hilfe des
Programmes Mathematica 3.0 gelöst. Mathematica greift dabei auf
die Funktion ''LSODE'' aus der ''ODEPACK''-Bibliothek von Alan
Hindmarsh [12] zurück, die auf dem BDF-Verfahren von Gear
basiert.
Nun kann das parameterabhängige Fehlerfunktional
mit der numerischen Lösung
nach Gleichung 30 bestimmt werden. Das
Minimum von wird dadurch angenähert, dass ausgehend von einem
Starttripel
für alle Kombinationen der
Parameterwerte
,
und
der Fehler
bestimmt wird. Dabei sind die , und
geeignet zu wählen. Das Tripel mit dem kleinsten
Fehler wird als neuer Startwert gewählt. Für den Fall, dass das
Starttripel den kleinsten Fehler besitzt, werden die
, und verkleinert. Dieses
Verfahren wird iterativ solange wiederholt, bis die änderung der
Parameter ist, oder der Fehler um weniger als pro
Iteration abnimmt.
Etablierte Verfahren zur Parameterbestimmung von linearen
Differentialgleichungen, wie sie zum Beispiel in [13] und
[14] angegeben sind, wurden erprobt, lieferten aber
augenscheinlich im Vergleich zum oben erklärten Verfahren keine
gute Fehlerminimierung.
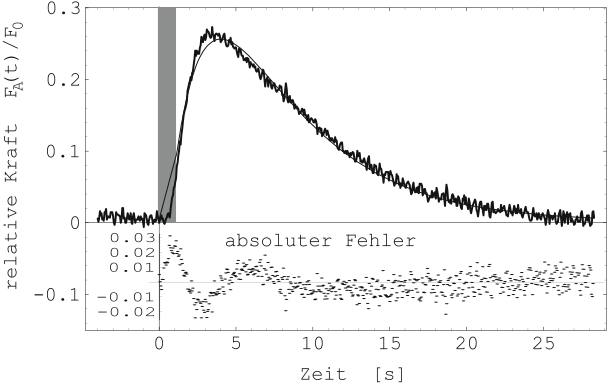
Abbildung 50 zeigt beispielhaft einen Vergleich
zwischen gemessener und angepasster Systemantwort mit absolutem
Fehler (Probe 9-F). Insgesamt wurde mehrmals für verschiedene
Längen von drei verschiedenen Proben (6-C, 7-C und 9-F) eine
Parameterbestimmung des aktiven Verhaltens durchgeführt. Die
Normierungskonstanten der einzelnen Proben sind in Tabelle
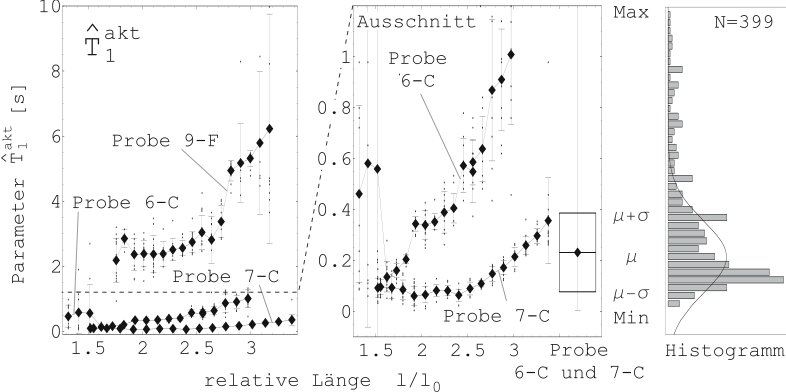
2 angegeben. Abbildung 51 zeigt die
bestimmten Parameter
für verschiedene Längen und
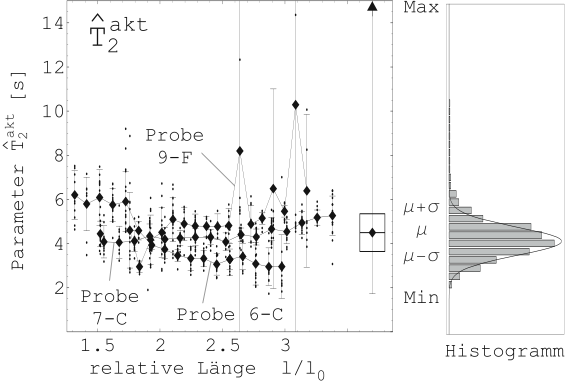
Proben, Abbildung 52 für
und
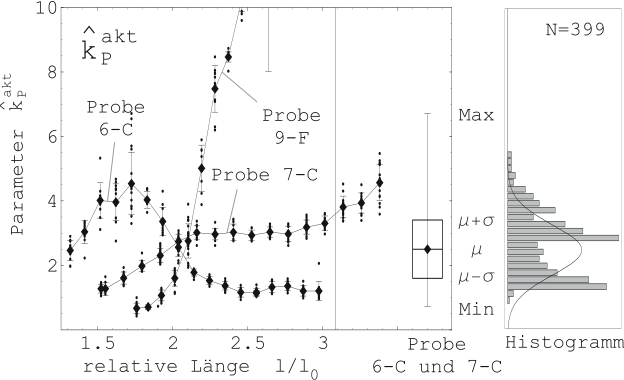
Abbildung 53 für
.
Probe 9-F zeigte schon bei der Messung ein anormales
Kontraktionsverhalten. Sie wird in Abbildung 51 und
53 als Messausreißer behandelt. In Tabelle
6 sind die Mittelwerte über verschiedene Längen und
Proben der ermittelten Parameter angegeben. Eine Mittelwertbildung
der Systemparameter über die verschiedenen Längen scheint bei
Probe 6-C und 7-C sinnvoll, da keine deutliche Längenabhängigkeit
der Parameter zu erkennen ist.
Abbildung 50:
Kontraktionsverlauf-Vergleich zwischen gemessenem und berechnetem
Ausgangssignal (Probe 9-F) mit absolutem Fehler.
Normierungskonstante : siehe Tabelle
2
Abbildung:
Links: Parameter
über der Länge
aufgetragen für drei verschiedene Proben, Mitte:
Auschnittsvergrößerung mit Box-Whisker-Plot, Rechts:
Histogramm;
Normierungskonstante : siehe Tabelle
2
Abbildung:
Links: Parameter
über der Länge
aufgetragen für drei verschiedene Proben, Rechts: Histogramm;
Normierungskonstante : siehe Tabelle 2
Abbildung:
Parameter
über der Länge aufgetragen
für drei verschiedene Proben, Rechts: Histogramm;
Normierungskonstante : siehe Tabelle 2
Tabelle 6:
Parameterschätzwerte des aktiven Verhaltens für Gleichung
34
Parameter
Mittelwert
Standardabweichung
10.3 Die Parameteridentifikation des passiven Verhaltens
Tabelle 7:
Parameterschätzwerte des passiven Verhaltens für
Gleichung 36
Parameter
Mittelwert
Standardabweichung
Es sollen nun die Parameter , und der
Gleichung 26 an das passive Verhalten angepasst
werden. Auch hier werden wie in Abschnitt 10.2.2 neue
Bezeichner für die Parameter eingeführt, und insbesondere die
ermittelten Parameterschätzwerte auch mit einem Dach versehen:
,
und
. Gleichung 30 schreiben wir hier
analog zu Gleichung 33:
Nun können mit Hilfe des in Abschnitt 10.2.2 vorgestellten
Verfahrens die Parameter , und
der Gleichung 36 an das gemessene passive Verhalten
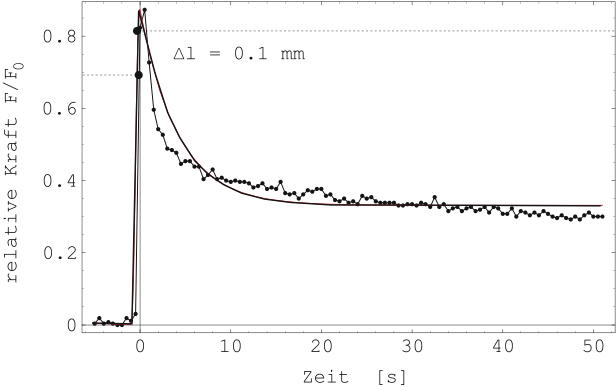
angepasst werden. Abbildung 54 zeigt beispielhaft
einen Vergleich zwischen gemessener Systemantwort auf eine
sprunghafte Längenänderung und der Systemantwort des angepassten
Systems. Die Parameterschätzwerte
,
und
wurden für drei
verschiedene Proben bei unterschiedlichen Längen jeweils für
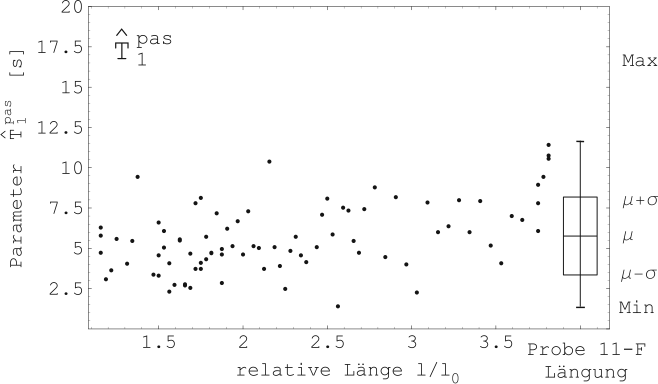
sprunghafte Verkürzung und Längung der Probe bestimmt. Abbildung
55 zeigt beispielhaft die Längenabhängigkeit
des Parameterschätzwertes
für Probe 11-F bei
sprunghafter Längung. Auch bei den anderen Parameterschätzwerten
und Proben — sowohl für Längung als auch Verkürzung — ist die
Abhängigkeit der Parameterschätzwerte von der Probenlänge zu
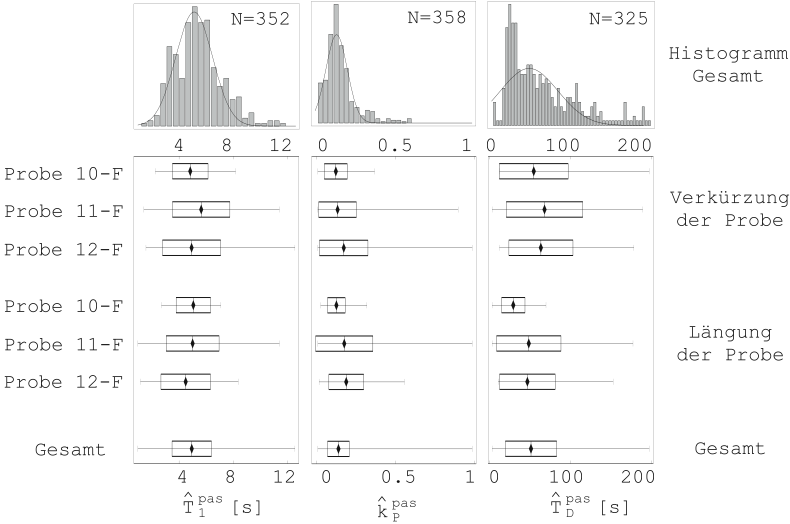
vernachlässigen. Abbildung
56 zeigt die ermittelten Mittelwerte und
Standardabweichungen für die verschiedenen Kategorien. Die
Gesamtmittelwerte sind in Tabelle
7 angegeben.
10.4 Ergebnisse
Der Versuch, das aktive Verhalten mit einem -System und das
passive Verhalten mit einem -System zu identifizieren,
liefert brauchbare Parameterschätzwerte (Tabellen
6 und 7). Das Reduzieren des mechanischen
Systemverhaltens des Muskelgewebes auf diese einfachen linearen
Systeme stellt natürlich eine Vereinfachung dar. Trotzdem sind
diese einfachen Modelle in der Lage, die wesentlichen, gemessenen
Systemeigenschaften der Muskulatur angenähert wiederzugeben.
Beim Vergleichen der ermittelten Systemparameter für das aktive
und passive Verhalten fällt auf, dass die Zeitkonstanten, die für
das Abklingverhalten verantwortlich sind (aktiv:
, passiv:
), bei beiden Systemen nahezu
übereinstimmen. Dies deutet darauf hin, dass sowohl beim aktiven
als auch beim passiven Verhalten teilweise die gleichen Prozesse
ablaufen. Ein Modell, das diese Erkenntnis nutzt, wird im
folgenden Abschnitt 11 vorgestellt.
Beim Betrachten der Box-Whisker-Plots in Abbildung
56 fällt auf, dass sich die Standardabweichung der
einzelnen Proben kaum von der Gesamtstandardabweichung
unterscheidet. Hier deutet sich an, dass selbst bei einer
größeren Anzahl von Messungen die ermittelten
Parameterschätzwerte nicht genauer bestimmt werden können. Dies
ist eine für biologische Gewebe typische Eigenschaft und muß
nicht von vornherein als Hinweis auf eine unpassende Modellierung
verstanden werden.
Abbildung 54:
Vergleich von gemessener und theoretischer Systemantwort
(Probe 11-F). Normierungskonstante
Abbildung:
Parameter
über der Länge aufgetragen
(Probe 11-F, Längung der Probe). Normierungskonstante
Abbildung:
Box-Whisker-Plots der Parameter
,
und
für verschiedene
Kategorien, oben: Histogramme der gesamten Daten